

AMB Series Unmanned Chassis


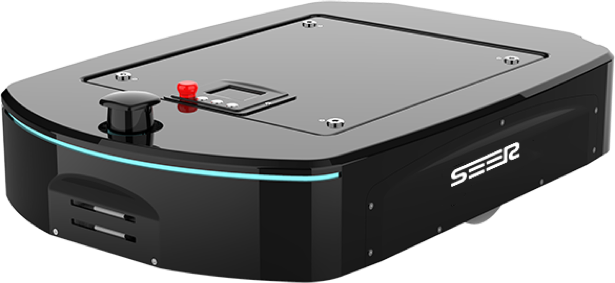
AMB Series Unmanned Chassis AMB (Auto Mobile Base) series unmanned chassis, a universal chassis designed for the mobile robots, provides some features such as map editing and localization navigation. It provides abundant extent interfaces such as I/O and CAN to mount various upper modules together with powerful client software and dispatching systems to help users quickly complete manufacture and application of mobile robots. There are four mounting holes on the top of the AMB series unmanned chassis, which supports arbitrary expansion with jacking, rollers, manipulators, latent traction, display, etc. to achieve multiple applications of one chassis. AMB together with SEER Enterprise Enhanced Digitalization can realize the unified dispatching and deployment of hundreds of AMB products at the same time, which greatly improves the intelligent level of internal logistics and transportation in the factory.
Descriptions
Descriptions of AMB Series Unmanned Chassis
Rich features available at any time
Comprehensive and excellent standard features and rich and practical advanced features help clients easily achieve intelligent logistics.
Multi-specification platforms available for expansion
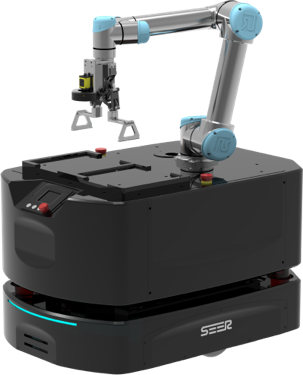
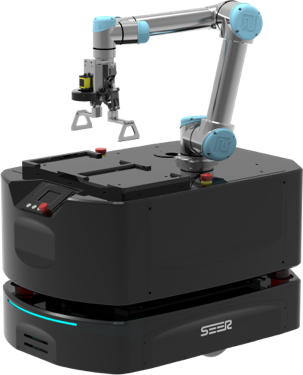
It offers a wide range of expansion platforms from 150 kg to 500 kg to meet the load and scenario requirements of different industries. It can also be used with manipulators, rollers, jacking, latent traction, pan/tilt, display screen, etc. to achieve multiple applications with one chassis.
±5 mm, efficient and accurate
Laser SLAM algorithm is used to achieve high-precision localization, with the laser non-reflective repeated locating accuracy within ±5 mm, enabling seamless docking between mobile robots and between mobile robots and humans, and efficient flow of cargoes among various points. Note: Actual values depend on environmental conditions
Stable navigation for safety and reliability
Network stability When there are multiple APs at the user site, the mobile robot can perform fast and stable roaming switching among multiple APs with optional industrial-grade Wifi client module that supports roaming to ensure the stability of the scheduling system connection.
Navigation stability Multiple navigation approaches ensure stable operation of the mobile robot.
3D obstacle avoidance A 3D vision sensor is added to identify and detect some three-dimensional obstacles (such as too low or too high obstacles, potholes on the ground, etc.) and choose to stop or bypass according to the configuration.
Easy deployment and visible management
SEER Enterprised Enhanced Digitalization, SEED easily enable mobile robot operation, dispatching and information management, and seamlessly connect with the plant's MES system to truly achieve intelligent logistics.
Specifications
Specifications of AMB Series Unmanned Chassis
AMB-150 | AMB-150-D
Basic parameters
|
Navigation method |
Laser SLAM |
|
|
Drive mode |
Two-wheel differential |
|
|
Shell color |
Pearl white/Pearl black/Customized Color |
|
|
L*W*H |
800*560*200mm |
|
|
Rotation diameter |
840mm |
|
|
Weight (with battery) |
66kg |
|
|
Load capacity |
150kg |
|
|
Chassis ground clearance |
25mm |
|
|
Laser scanning height |
228mm |
|
|
Network |
Ethernet / Wi-Fi 802.11 a/b/g/n/ac |
|
|
Temperature and humidity range |
TEMP: 0-50℃/ RH: 10-90%, no compression, no condensation |
|
|
IP rating[1] |
IP20 |
Performance parameters
|
Passability (slope/step/gap)[2] |
< 5%/5mm/10mm |
|
|
700mm |
||
|
Navigation position accuracy[3] |
±5mm |
|
|
Navigation angle accuracy[3] |
±0.5° |
|
|
Navigation speed |
≤1.4m/s |
|
|
Map area (single frame) |
≤400000m² |
Battery parameters
|
Battery specifications |
48V/35Ah (Ternary lithium) |
|
|
Comprehensive battery life |
12h |
|
|
Charging time (10-80%) |
≤ 2h |
|
|
Charging method |
Manual/Automatic/Quick change |
|
|
Battery cycles |
>500 |
Extended interfaces
|
PowerDO |
Seven-way (total load capacity 24V/2A) |
|
|
DI |
Ten-way (NPN) |
|
|
E-stop interface |
Two-way output |
|
|
Wired network |
Three-way RJ45 gigabit ethernet |
Configurations
|
Number of lidar |
1 or 2(P+FR2000-HD) |
|
|
HMI display |
√ |
|
|
E-stop button |
√ |
|
|
Buzzer |
√ |
|
|
Speaker |
√ |
|
|
Atmosphere light |
√ |
|
|
Bumper strip |
× |
Features
|
Basic features[4] |
√ |
|
|
Wi-Fi roaming |
√ |
|
|
Automatic charging[5] |
√ |
|
|
Shelf recognition[6] |
√ |
|
|
Laser reflector navigation |
〇 |
|
|
3D obstacle avoidance[7] |
〇 |
Certifications
|
EMC/ESD |
√ |
|
|
√ |
||
|
RoHS |
√ |
|
|
REACH |
√ |
AMB-300 | AMB-300-D
Basic parameters
|
Navigation method |
Laser SLAM |
|
|
Drive mode |
Two-wheel differential |
|
|
Shell color |
Pearl white/Pearl black/Customized Color |
|
|
L*W*H |
1000*700*200mm |
|
|
Rotation diameter |
1040mm |
|
|
Weight (with battery) |
144kg |
|
|
Load capacity |
300kg |
|
|
Chassis ground clearance |
25mm |
|
|
Laser scanning height |
228mm |
|
|
Network |
Ethernet / Wi-Fi 802.11 a/b/g/n/ac |
|
|
Temperature and humidity range |
TEMP: 0-50℃/ RH: 10-90%, no compression, no condensation |
|
|
IP rating[1] |
IP20 |
Performance parameters
|
Passability (slope/step/gap)[2] |
< 5%/5mm/30mm |
|
|
840mm |
||
|
Navigation position accuracy[3] |
±5mm |
|
|
Navigation angle accuracy[3] |
±0.5° |
|
|
Navigation speed |
≤1.4m/s |
|
|
Map area (single frame) |
≤400000m² |
Battery parameters
|
Battery specifications |
48V/52Ah (Ternary lithium) |
|
|
Comprehensive battery life |
12h |
|
|
Charging time (10-80%) |
≤ 2.5h |
|
|
Charging method |
Manual/Automatic/Quick change |
|
|
Battery cycles |
>500 |
Extended interfaces
|
PowerDO |
Seven-way (total load capacity 24V/2A) |
|
|
DI |
Ten-way (NPN) |
|
|
E-stop interface |
Two-way output |
|
|
Wired network |
Three-way RJ45 gigabit ethernet |
Configurations
|
Number of lidar |
1 or 2(P+FR2000-HD) |
|
|
HMI display |
√ |
|
|
E-stop button |
√ |
|
|
Buzzer |
√ |
|
|
Speaker |
√ |
|
|
Atmosphere light |
√ |
|
|
Bumper strip |
× |
Features
|
Basic features[4] |
√ |
|
|
Wi-Fi roaming |
√ |
|
|
Automatic charging[5] |
√ |
|
|
Shelf recognition[6] |
√ |
|
|
Laser reflector navigation |
〇 |
|
|
3D obstacle avoidance[7] |
〇 |
Certifications
|
EMC/ESD |
√ |
|
|
√ |
||
|
RoHS |
√ |
|
|
REACH |
√ |
AMB-500 | AMB-500-D
Basic parameters
|
Navigation method |
Laser SLAM |
|
|
Drive mode |
Two-wheel differential |
|
|
Shell color |
Pearl white/Pearl black/Customized Color |
|
|
L*W*H |
1000*700*200mm |
|
|
Rotation diameter |
1040mm |
|
|
Weight (with battery) |
130kg |
|
|
Load capacity |
500kg |
|
|
Chassis ground clearance |
20mm |
|
|
Laser scanning height |
228mm |
|
|
Network |
Ethernet / Wi-Fi 802.11 a/b/g/n/ac |
|
|
Temperature and humidity range |
TEMP: 0-50℃/ RH: 10-90%, no compression, no condensation |
|
|
IP rating[1] |
IP20 |
Performance parameters
|
Passability (slope/step/gap)[2] |
< 5%/5mm/30mm |
|
|
840mm |
||
|
Navigation position accuracy[3] |
±5mm |
|
|
Navigation angle accuracy[3] |
±0.5° |
|
|
Navigation speed |
≤1.0m/s |
|
|
Map area (single frame) |
≤400000m² |
Battery parameters
|
Battery specifications |
48V/52Ah (Ternary lithium) |
|
|
Comprehensive battery life |
10h |
|
|
Charging time (10-80%) |
≤ 2.5h |
|
|
Charging method |
Manual/Automatic/Quick change |
|
|
Battery cycles |
>500 |
Extended interfaces
|
PowerDO |
Seven-way (total load capacity 24V/2A) |
|
|
DI |
Ten-way (NPN) |
|
|
E-stop interface |
Two-way output |
|
|
Wired network |
Three-way RJ45 gigabit ethernet |
Configurations
|
Number of lidar |
1 or 2(P+FR2000-HD) |
|
|
HMI display |
√ |
|
|
E-stop button |
√ |
|
|
Buzzer |
√ |
|
|
Speaker |
√ |
|
|
Atmosphere light |
√ |
|
|
Bumper strip |
× |
Features
|
Basic features[4] |
√ |
|
|
Wi-Fi roaming |
√ |
|
|
Automatic charging[5] |
√ |
|
|
Shelf recognition[6] |
√ |
|
|
Laser reflector navigation |
〇 |
|
|
3D obstacle avoidance[7] |
〇 |
Certifications
|
EMC/ESD |
√ |
|
|
√ |
||
|
RoHS |
√ |
|
|
REACH |
√ |
- AMB series products are certified to EN ISO 12100, EN 60204-1, EN1526 and EN ISO 10218-2.
- Built-in batteries of AMB series products are certified to PSE and granted UN38.3 conformity report for air, sea & land transportation as well as MSDS report.
- AMB series products are tested to ESD by relevant authority.
- AMB series products conform to EU's REACH Directive.
- AMB series products are certified to RoHS for human health and environment protection.
- The traction when using latent traction or hook. The friction coefficient is affected by the ground and the material of the universal wheel. Here, μ = 0.1 is taken as an example. If a weight is added to the car body, the traction can be increased to some extent (AMB300 is able to provide up to 500 N traction after a weight is added).
- The road surface should be smooth, clean and free of obvious ups and downs. Slope 5% = arctan (0.05) ≈ 2.8°. The robot must not stop or turn at the ramps, steps, or gaps, but can pass quickly perpendicular to them.
- The localization accuracy is affected by the environment, etc., subject to the interpretation of localization accuracy in the final technical agreement.
- The basic features include but are not limited to map editing, model editing, positioning module, navigation module, basic motion model (differential), peripheral extension features (robot arm, roller, jacking, latent traction) and API interface.
- It needs to be used with the automatic charging pile of SEER.
- It needs to be used with a latent traction or jacking extension module.
- A 3D camera needs to be installed in the peripheral extension for the feature.
- AMB is designed for indoor transportation only and is not recommended for outdoor use.
Pictures/Videos
Downloads
Shanghai Seer Intelligent Technology Corporation (SEER), is aamr robot companiesand amb factory, we provideamb in car, agv slam technology and etc. Want to know more? Please contact us.
Send product request
Other supplier products
 |
AMB-powered Autonomous Warehouse Robots | AMB-powered Autonomous Warehouse Robots are built by mounting robotic arm on the AMB series unmanned chassis, which can be compatible with a variet... |
 |
AMB | MOBILE ROBOT CHASSIS AMB AMB in carSeries Unmanned Chassis AMB (Auto Mobile Base) for agv autonomous vehicle, a universal chassis designed for ag... |
 |
AMB-powered Composite Robot | AMB-powered Composite Robot is built by mounting robotic arm on the AMB series unmanned chassis, which can be compatible with a variety of manipula... |
 |
SLAM AGV SFL-CDD20 | SLAM AGV SFL-CDD20 is equipped with a built-in SRC Series Controller developed by SEER. It can pick up accurately by pallet identification sensor, ... |
 |
AMB-powered Roller Robot | AMB-powered Roller Robot, as the production docking robot, is built by mounting roller module on AMB series unmanned chassis. Complete the construc... |
Same products
 |
5MWh Energy Storage System | Seller: Hebei Jingye New Energy Technology Co., Ltd. | 5MWh Energy Storage System Battery Technology: Utilizes mature, high-efficiency, long-life l... |
 |
417KWH Energy Storage System | Seller: Hebei Jingye New Energy Technology Co., Ltd. | 417KWH Energy Storage System High Energy Density: Utilizes 314Ah high-energy density cells. ... |
 |
261KWH Energy Storage System | Seller: Hebei Jingye New Energy Technology Co., Ltd. | 261KWH Energy Storage System High Energy Density: Utilizes 314Ah high-energy density cells. ... |
 |
C&I Energy Storage Systems | Seller: Hebei Jingye New Energy Technology Co., Ltd. | C&I Energy Storage Systems New Energy’s Commercial & Industrial (C&I) Ener... |
 |
Electrical Energy Storage Systems | Seller: Hebei Jingye New Energy Technology Co., Ltd. | Electrical Energy Storage Systems New Energy is a leading provider of advanced energy storag... |
